

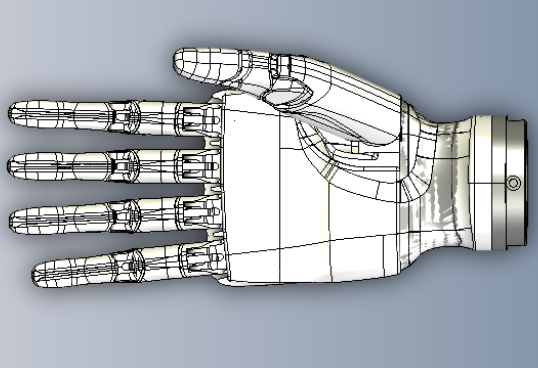
ინტელექტუალური წარმოებისა და რობოტიკის სწრაფი განვითარებით, ჰუმანოიდი რობოტების მოხერხებული ხელი სულ უფრო მნიშვნელოვანი ხდება, როგორც გარე სამყაროსთან ურთიერთქმედების ინსტრუმენტი. მოხერხებული ხელი შთაგონებულია ადამიანის ხელის რთული სტრუქტურითა და ფუნქციით, რაც რობოტებს საშუალებას აძლევს შეასრულონ მრავალფეროვანი ამოცანები, როგორიცაა მოჭიდება, მანიპულირება და შეგრძნებაც კი. სამრეწველო ავტომატიზაციისა და ხელოვნური ინტელექტის ტექნოლოგიების უწყვეტი პროგრესით, მოხერხებული ხელები თანდათან გარდაიქმნება ერთი განმეორებადი დავალების შემსრულებლიდან ინტელექტუალურ სხეულად, რომელსაც შეუძლია რთული და ცვალებადი ამოცანების შესრულება. ამ ტრანსფორმაციის პროცესში თანდათან გამოჩნდა შიდა მოხერხებული ხელის კონკურენტუნარიანობა, განსაკუთრებით წამყვანი მოწყობილობის, გადამცემი მოწყობილობის, სენსორული მოწყობილობის და ა.შ. სფეროში, ლოკალიზაციის პროცესი სწრაფია, ფასის უპირატესობა აშკარაა.
პლანეტარულიrოლერიsეკიპაჟებიჰუმანოიდი რობოტის „კიდურების“ ცენტრალურ ნაწილს წარმოადგენს და მათი გამოყენება სხვადასხვა დანიშნულებით შეიძლება, მათ შორის ხელების, ფეხების და მოხერხებული ხელების გამოყენებით, რათა უზრუნველყოფილი იყოს ზუსტი ხაზოვანი მოძრაობის კონტროლი. ტესლას Optimus-ის ტორსი ხელში იყენებს 14 მბრუნავ სახსარს, 14 ხაზოვან სახსარს და 12 ღრუ ჭიქისებრ სახსარს. ხაზოვანი სახსრები იყენებს 14 შებრუნებულ პლანეტარულ ლილვაკოვან ხრახნს (2 იდაყვში, 4 მაჯაში და 8 ფეხში), რომლებიც კატეგორიზებულია სამ ზომად: 500N, 3900N და 8000N, რათა მოერგოს სხვადასხვა სახსრის დატვირთვის მოთხოვნილებებს.
Tesla-ს მიერ თავის ჰუმანოიდურ რობოტ Optimus-ში ინვერსიული პლანეტარული ლილვაკების გამოყენება შესაძლოა მათი უპირატესობებით იყოს განპირობებული, განსაკუთრებით დატვირთვის ტევადობისა და სიმტკიცის თვალსაზრისით. თუმცა, არ არის გამორიცხული, რომ უფრო დაბალი დატვირთვის ტევადობის მოთხოვნების მქონე ჰუმანოიდი რობოტები უფრო იაფი ბურთულიან ხრახნებს იყენებენ.
ბურთისხვადასხვა ინდუსტრიის ეკიპაჟები ფართო სპექტრის აპლიკაციებითა და ბაზრის მოთხოვნით:
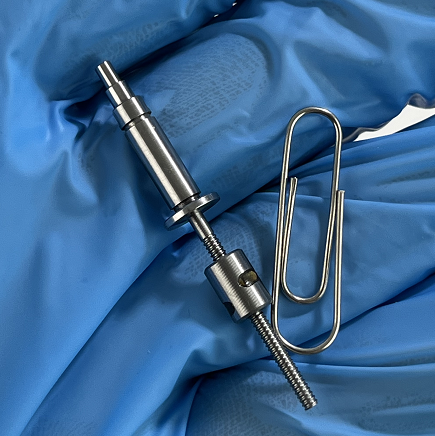
2024 წლის პეკინის რობოტიკის გამოფენაზე KGG-მ წარმოადგინა 4 მმ დიამეტრის პლანეტარული ლილვაკები და 1.5 მმ დიამეტრის ბურთულიანი ხრახნები; გარდა ამისა, KGG-მ ასევე წარმოადგინა მოხერხებული ხელები ინტეგრირებული პლანეტარული ლილვაკების გადაწყვეტილებებით.


4 მმ დიამეტრის პლანეტარული როლიკებიანი ხრახნები


1. გამოყენება ახალი ენერგიის ავტომობილებში: ავტომობილების ელექტრიფიკაციისა და ინტელექტუალიზაციის განვითარებასთან ერთად, გამოყენებაბურთიხრახნებისაავტომობილო სფეროში გაღრმავდება ისეთი ტექნოლოგიები, როგორიცაა საავტომობილო ბორბლის კიდეზე დამონტაჟებული მავთულხლართიანი დამუხრუჭების სისტემა (EMB), უკანა ბორბლის საჭის სისტემა (iRWS), მავთულხლართიანი საჭის სისტემა (SBW), საკიდრის სისტემა და ა.შ., ასევე საავტომობილო კომპონენტების მარეგულირებელი და საკონტროლო მოწყობილობები.
2. ჩარხების ინდუსტრიის გამოყენება: ბურთისებრი ხრახნი ჩარხების ერთ-ერთი სტანდარტული ძირითადი კომპონენტია, ჩარხები შეიცავს მბრუნავ ღერძებს და ხაზოვან ღერძებს, ხაზოვანი ღერძები შედგება ხრახნებისა დასახელმძღვანელო რელსებისამუშაო ნაწილის ზუსტი პოზიციონირებისა და გადაადგილების მისაღწევად. ტრადიციული ჩარხები ძირითადად იყენებენ ტრაპეციულ ხრახნებს/მოცურების ხრახნებს, CNC ჩარხები დაფუძნებულია ტრადიციულ ჩარხებზე, ციფრული მართვის სისტემების დამატებით, წამყვანი სამუშაო ნაწილის სიზუსტის მოთხოვნები უფრო მაღალია და ამჟამად გამოიყენება მეტი ბურთულიანი ხრახნი. გლობალური ჩარხების ქარხნის მიწოდების ჯაჭვი შპინდელის, ქანქარას თავის, მბრუნავი მაგიდის და სხვა ფუნქციური კომპონენტების უმეტესი ჩარხების ქარხნების უმეტესობის პერსონალიზაციის ან დიფერენციაციის გათვალისწინებით, როგორც წესი, თვითწარმოებულია და თვითწარმოებულია, მაგრამ მოძრავი ფუნქციური კომპონენტები ძირითადად მთლიანად აუთსორსინგია, ჩარხების ინდუსტრიის მოძრავი ფუნქციური კომპონენტების განახლებასთან ერთად, ძლიერი დარწმუნებით მდგრადი ზრდის მოთხოვნით.


1.5 მმ დიამეტრის ბურთულიანი ხრახნები
3. ჰუმანოიდი რობოტის გამოყენება: ჰუმანოიდი რობოტის აქტივატორები იყოფა ჰიდრავლიკურ და მოტორიზებულ მექანიზმებად, რომლებიც ორი პროგრამისაა. ჰიდრავლიკური მექანიზმი, მიუხედავად იმისა, რომ უკეთესი შესრულება აქვს, მაგრამ ღირებულება და მოვლა-პატრონობის ხარჯები უფრო მაღალია და ამჟამად ნაკლებად გამოიყენება. ძრავის გადაწყვეტა ამჟამად ყველაზე გავრცელებული არჩევანია, პლანეტარული როლიკებით მოძრავი ხრახნი ძლიერი დატვირთვის ტარების უნარით გამოირჩევა და მისი ძირითადი კომპონენტია.ხაზოვანი აქტივატორიჰუმანოიდი რობოტის, რომელიც გამოიყენება რობოტის სახსრების ზუსტი კონტროლისთვის. ამ ტექნოლოგიურ გზას იყენებდნენ საზღვარგარეთის Tesla, გერმანიის LOLA რობოტი მიუნხენის უნივერსიტეტში, ადგილობრივი პოლიტექნიკური უნივერსიტეტი Huahui, Kepler.
პლანეტარული როლიკებით ხრახნების ამჟამინდელი შიდა ბაზარი ძირითადად უცხოელი მწარმოებლებით არის დაკავებული, შვეიცარიის წამყვანი უცხოელი მწარმოებლების, Rollvis-ის, შვეიცარიის GSA-ს და შვედეთის Ewellix-ის ბაზრის წილი 26%, 26% და 14% იყო.
პლანეტარული ლილვაკების ხრახნების ძირითად ტექნოლოგიაში ადგილობრივ საწარმოებსა და უცხოურ საწარმოებს შორის გარკვეული ხარვეზია, თუმცა სიზუსტის, მაქსიმალური დინამიური დატვირთვის, მაქსიმალური სტატიკური დატვირთვისა და სხვა შესრულების ასპექტების მხრივ თანდათან ეწევა, რაც იმას ნიშნავს, რომ ადგილობრივი პლანეტარული ლილვაკების მწარმოებლების ერთობლივი საბაზრო წილი 19%-ია.
გამოქვეყნების დრო: 2025 წლის 28 თებერვალი




